仿生“机器鸟”诞生,由斯坦福团队研发,有望用于用于火灾预警系统、天气模式监测等
收藏
关键词:
研发
资讯来源:DeepTech深科技 + 订阅账号
发布时间:
2022-01-06
一直以来,对于鸟类的仿生机器人研究,人们大多关注它们如何高效地在空中飞行,例如仿照鸟类的翅膀结构设计出扑翼式无人机。
而
鸟类能够在复杂环境下栖息和抓取的能力也同样令人惊叹:
猎鹰不仅能平稳地降落在凹凸不平的岩壁,还能从高空俯冲而下捕获猎物。
除了具备高超的飞行技巧外,鸟类的这些强大能力还依赖于它们看似普通的鸟腿和鸟爪。
受此启发,美国斯坦福大学的研究者马克·卡特科斯基(Mark Cutkosky )和大卫·兰亭克(David Lentink)的团队,通过深入研究鸟爪的构造和着陆机理,
研发出一套名为“Stereotyped Nature-Inspired Aerial Grasper (SNAG)”的仿生机械鸟爪系统,
并将其安装在旋翼无人机平台上,构造出一个既能在任何复杂表面上起降,又能动态抓取不规则物体的空中机器人。
图 | 空中机器人模拟猎鹰抓取物体(Science Robotics)
相关成果以论文形式
[1]
发表在 Science Robotics 期刊上,论文题为《在树栖环境中受鸟类启发的动态抓取和栖息》(Bird-inspired dynamic grasping and perching in arboreal environments),这一创新对于鸟类的生物学研究和无人机的工程应用来说都是极大的突破。
图 | 空中机器人模拟鸟类栖息在树枝上
(Science Robotics)
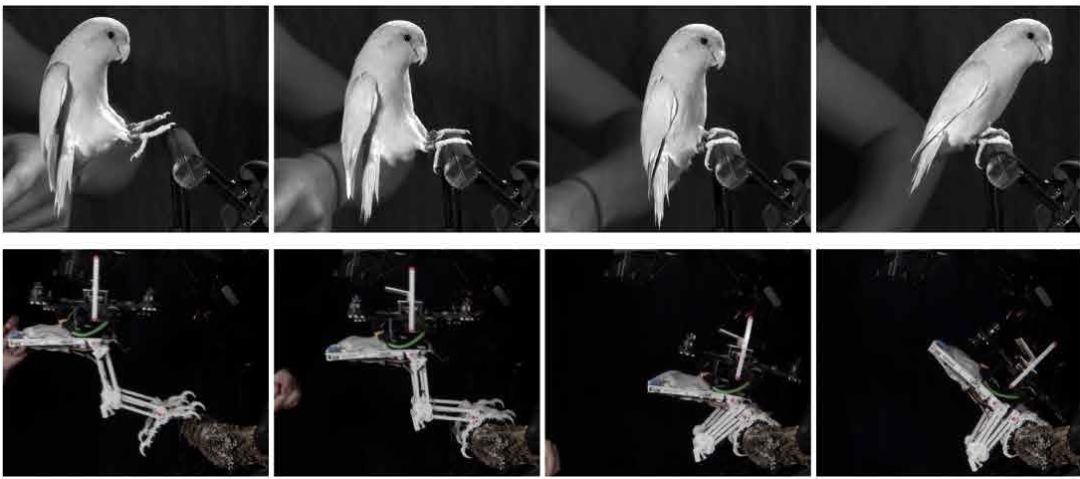
论文第一作者威廉·罗德里克(William Roderick)表示,“经过千百万年的进化,不管树枝的粗细和曲折度,降落点表面的粗糙度等各种环境因素有多么的不同,鸟类都可以做到近乎一致的降落表现,而要模仿这种灵活的栖息行为并不容易”。
目前,对机器人的抓取或栖息的研究大多只是针对小部分特定的场景或特殊的表面,无法广泛用于现实环境。为了解决这一问题,生物力学的相关研究表明,鸟类的这种模式化的着陆行为本质上遵循着一种“基于碰撞时间的引导策略”,即,鸟类在着陆时会根据当前的飞行速度做出一系列的调整动作来控制与接触面的碰撞,如身体上仰、伸展腿和爪,接触到树枝时时腿部弯曲并缓冲,脚趾通过包裹挤压接触面来增大抓力,调整身体以维持平衡,等等。
根据这些理论,研究人员选取猎鹰和短尾鹦鹉作为仿生研究对象,一方面,从解剖学层面获得猎鹰的腿部生理构造,另一方面,通过高速相机记录短尾鹦鹉在不同种类的树枝上的飞行着陆数据,包括飞行的速度,抓取角度等,依此对这一运动过程进行建模,从而逐步展开设计与研究。
图 | 空中机器人复现短尾鹦鹉的着陆过程(Sc
ience Robotics)
研究过程和亮点
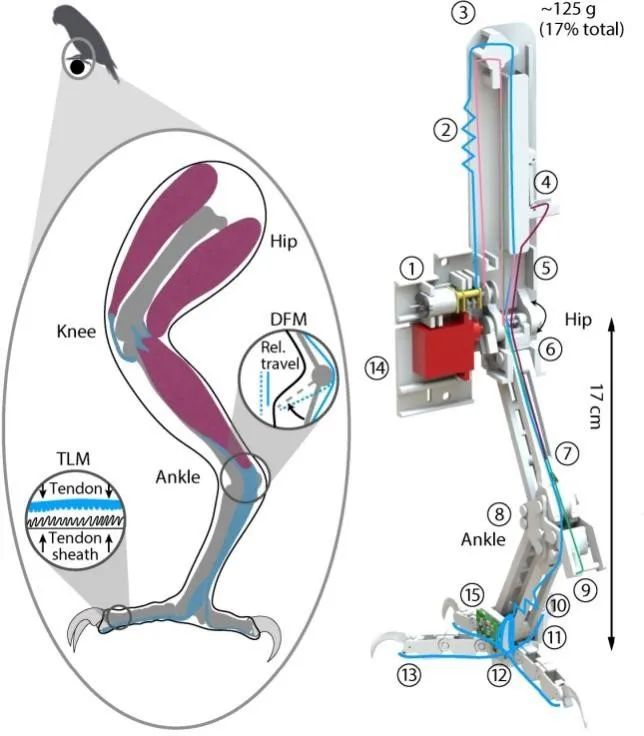
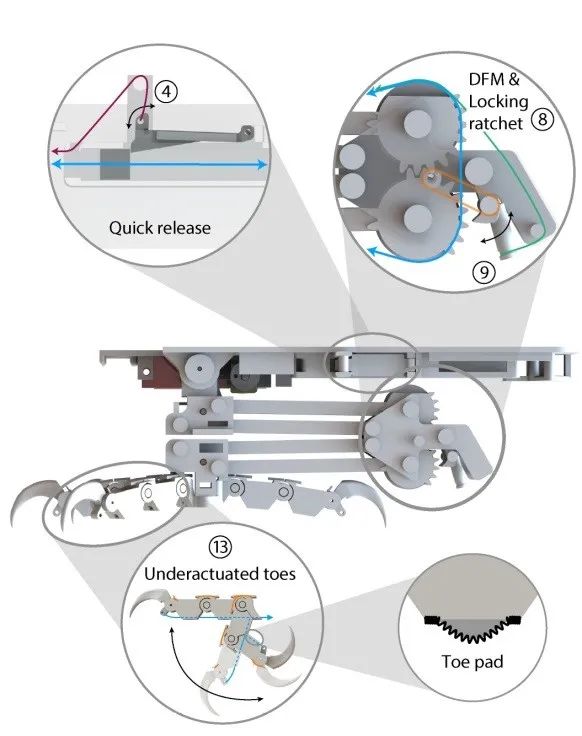
首先,研究者们参照鸟类的腿部构造,以等比的尺寸和重量设计并制造了 SNAG 的机械结构。整个仿生鸟爪的刚性结构都是通过 3D 打印技术制造,用来模拟鸟腿部的骨骼、关节和脚趾,并采用伺服电机和双弹簧机构提供对腿部动作的控制力和脚趾的抓握力,用来模拟腿部的肌肉和肌腱功能。
同时,类似鸟爪趾端的肉垫,一种可形变的橡胶缓冲垫也被粘贴嵌入到鸟爪上,用来增大抓握时的摩擦力。
图 | 仿鸟爪机构 SNAG 的机械设计示意图(Science Robotics)
依靠这些精密的机械结构,鸟类自然抓取的两个关键机制得以复现。
一个是“屈肌机制”:
通过关节弯屈折叠,拉伸腿部肌腱弹簧,
在吸收接触冲击力的同时,还能将冲击能量转化为更大的抓力
;
另一个是“腱锁机制”:
在腿部弯曲的同时,通过脚部电机提前储能过的趾部肌腱弹簧迅速收缩使脚趾闭合,并通过棘轮装置锁死,整个过程在50ms内完成,使得爪子能够迅速地牢牢抓住物体。而当要离开栖息物时,可再次通过脚部的电机解锁释放掉肌腱张力,腿便可以重新伸展。
图 | 仿鸟爪机构 SNAG 的机械设计示意图(Science Robotics)
其次,研究人员利用该套机械结构研究影响鸟类成功着陆的潜在因素,例如:机械硬件参数(机体的质量、尺寸大小等)、运动学参数(着陆时的速度大小和方向、腿的屈伸角度、机体的平衡角度等)以及不同的栖息表面参数等等。
通过基于力学理论分析得到的数学模型和实验测试数据来估计这些参数的边界,构建出一个类似于飞行包线的“充分栖息域”模型。
该模型不仅可以进一步优化系统结构,还为着陆控制的设计提供了可靠依据。
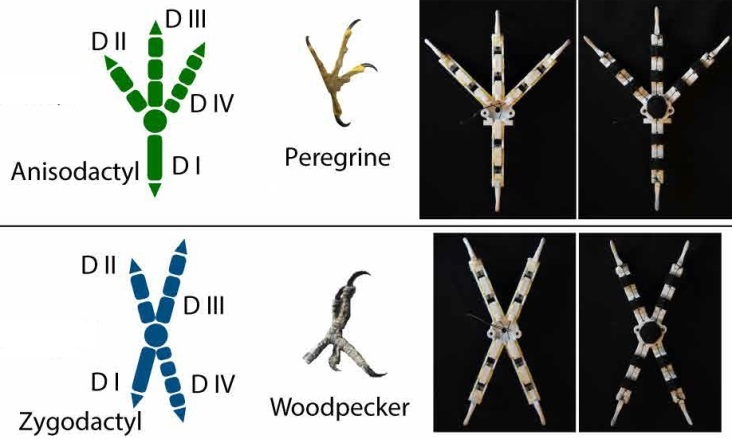
此外,研究人员还专门设计实验测试了不同的脚趾构型的着陆表现,即,常见于猎鹰的
“三趾朝前一趾朝后”的 anisodactyl 构型和常见于鹦鹉的“两趾朝前两趾朝后”的 zygodactyl 构型
,最终得出结论:这两种构型在功能上并没有太大差异,任一构型都不会更有进化上的优势。
图 | 两种常见的鸟类脚趾构型示意图(Science Robotics)
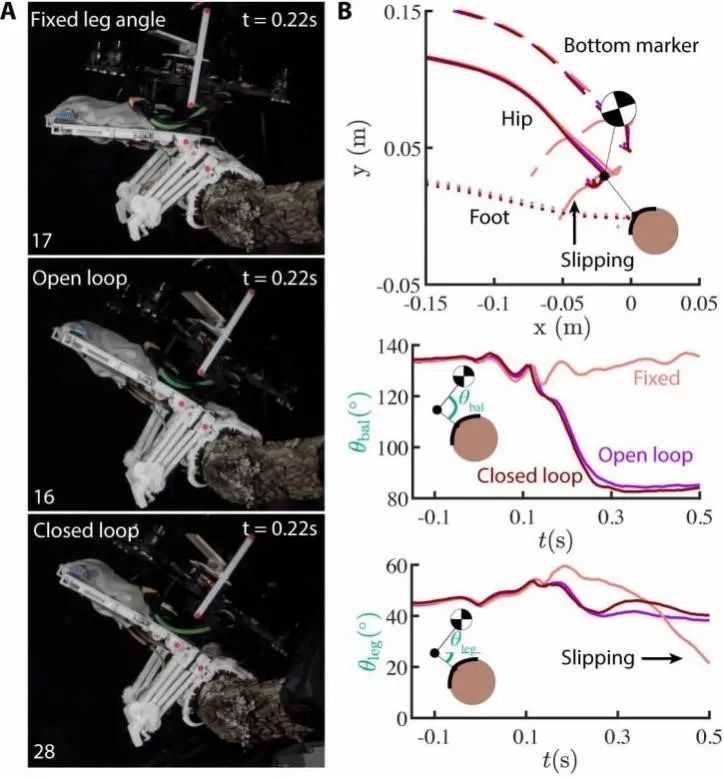
然后,着陆后的平衡控制也是至关重要的,因为主动的平衡控制,能够扩大“充分栖息域”的范围,从而大大提高着陆的成功率。因此,研究者们在 SNAG 的右脚上安装了一个加速度计来感知并识别是否已经着陆。
一旦平衡算法机制被触发,机器人便通过旋转机体平台调整重心,维持平衡。实验中测试了固定角度调节、开环调节和闭环调节三种平衡控制算法,其中闭环调节方案使用了加速度计的反馈来调整重心,在各种测试情况下都表现出更好的着陆性能。
图 | 不同平衡控制算法的性能对比(Science Robotics)
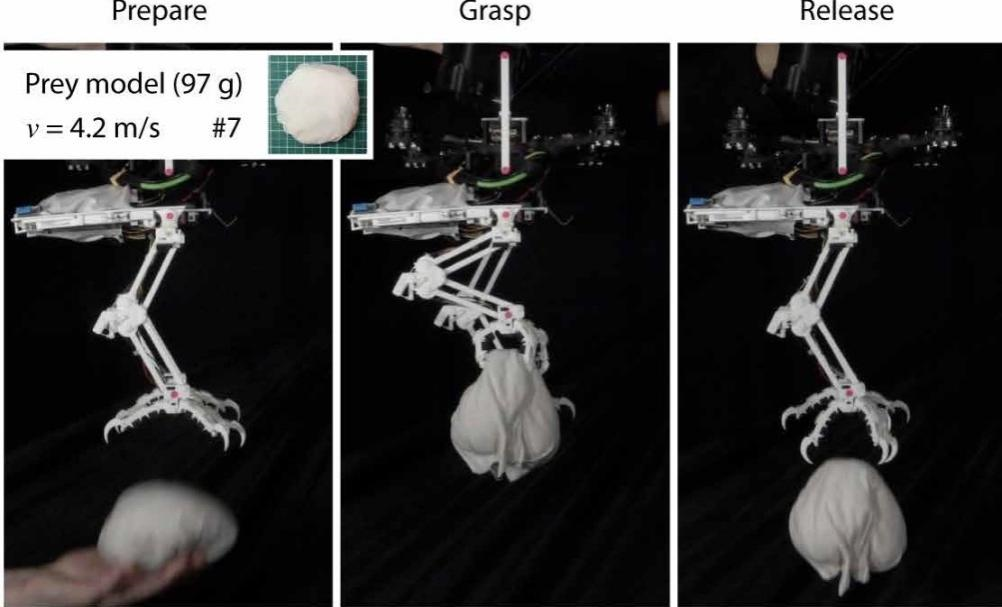
由于物体的抓取原理和着陆相似,两者的不同之处在于机器人的速度会动态变化,抓取物的表面质地,以及对仿生机械爪的冲击力,因此研究者们利用同一套硬件装置测试了该空中机器人的动态抓取能力。
图 | SNAG空中机器人的动态抓取能力测试
(Science Robotics)
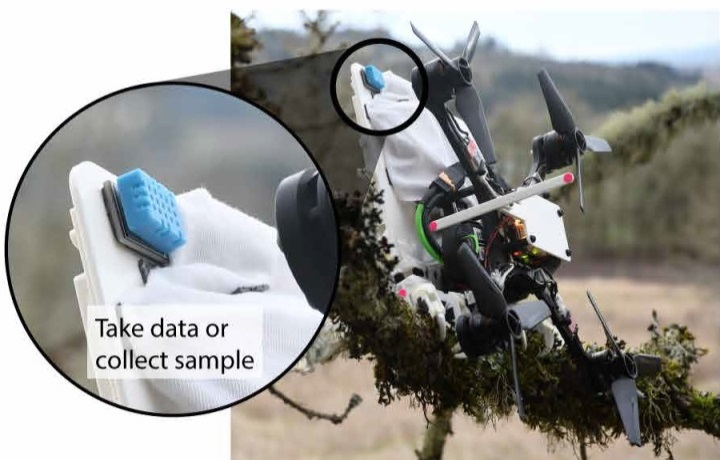
实验表明,SNAG 的抓取能力同样出色,能够顺利抓放类似于鹰隼猎物大小的物体。最后,研究团队对该空中机器人进行了更加综合的户外测试:操控机器人从一块草地起飞,降落并栖息在树枝上,然后监测并记录当地环境的温湿度等气候数据,最后又返回原起飞点。
图 | SNAG 空中机器人的户外测试
(Science Robotics)
实际应用和未来展望
户外的测试实验充分展示了该机器人在丛林中的优势:通过加载不同的传感器模块,该种具有仿鸟爪结构的空中机器人能够被广泛应用于野外丛林环境中,除了可以用来收集野外气象环境、动植物样本等数据外,还能完成野外搜救、森林火灾预警等任务。
得益于其强大的树栖能力,该机器人能够停在树枝上执行任务,从而大大节省电池电量,或者在栖息时通过太阳能充电,从而有效解决了传统无人机续航的问题。
此外,由于该研究的仿生属性,该机器人还可以反过来用于鸟类生物学的研究,减少对活体动物的伤害。
图 | 树栖机器人用于检测丛林气候(Science Robotics)
然而,为了进一步推动该机器人的实际应用,现有的工作还需要很多的改进。
首先,机器人的仿生机械爪系统和飞行平台之间的功能联系并不紧密,例如真实鸟类着陆时,一般会通过翅膀产生辅助气动力,来维持身体的平衡,而非仅仅依靠腿部力量的调节,因此,系统还需要对各个组件进行更深入的集成。
其次,当前研究中脚部的加速度计为身体的平衡调节提供唯一的信息反馈,而真实鸟类则可以依靠诸如视觉、触觉等更多的信息源,因此,系统还可以从多传感器信息融合方面进一步完善,从而提高抓取和着陆的能力。
最重要的,目前该机器人是通过操作人员远程遥控飞行,视觉筛选并定位树枝、自动接近目标树枝等功能迫切需要开发和测试,来加强其自动化的程度。
参考:
1、W.R. T. Roderick, M. R. Cutkosky, and D. Lentink, “Bird-inspired dynamic graspingand perching in arboreal environments,” Sci. Robot., Dec. 2021, doi: 10.1126/scirobotics.abj7562.


 个人中心
个人中心
 我是园区
我是园区
 退出
退出