个人中心
个人中心
 我是园区
我是园区
 退出
退出
您还不是认证园区!
赶快前去认证园区吧!

在漫威宇宙中,托尼·史塔克(钢铁侠)利用自身研发的 Mark 装甲可以在天空自由飞行。而前期的 Mark 装甲似乎就是将推进器附着四肢上进行飞行。
事实上,电影中的科幻构想全部源自于现实科学应用基础之上,就算像 Mark 一样的飞行机器人也可能出现在现实生活中。

近日,广东工业大学的自动化学院的智能检测与控制研究团队、副教授黄之峰研究小组成功研发一款新型可飞行的仿人机器人。这款被命名 Jet-HR2 的仿人机器人目前已完成样机起飞实验。
据悉,黄之峰 2011 年在日本东京大学(The University of Tokyo)读博期间,曾亲历日本 “3·11” 大地震。他表示,“当时房屋坍塌、地面垮塌等情况非常严重,我们做机器人的老师同学就在想,机器人研究了这么多年,为什么不能有仿人机器人代替人类,走进废墟救人呢?”
由此起,他开始致力于研发可以跨越复杂地形和障碍的仿人机器人。
 图|震后废墟(来源:Pixabay)
图|震后废墟(来源:Pixabay)其实早在 2018 年,黄之峰团队就研发出一款双足机器人 Jet-HR1。Jet-HR1 的原理是通过在足部嵌入形似“风火轮”式涵道风扇来维持平衡并跨越障碍, 该研究成果的相关论文两次发表在机器人顶级学术会议 IROS 上,并在当年被 IEEE Spectrum 机器人栏目专题报道。
而此次研究团队通过矢量推进器的方法,让双足机器人 Jet-HR2 实现起飞控制。在实验中,由于所有实验都同一姿势升空,所以研究团队为防止机器人失衡摔落,特意在 Jet-HR2 腰部安装了碳管装置,以便能更好地控制机器人。
首先,研究团队在 Jet-HR2 没有打开偏航控制器的条件下试飞,不过当 Jet-HR2 升空后便出现偏移,甚至呈自转趋向。
而 Jet-HR2 在没有打开俯仰控制器的飞行状态下,起飞呈向前俯冲趋势。
最后,Jet-HR2 在偏航及俯仰控制器完全打开的条件下再次试飞。相较之前,在俯仰和偏航控制器共同作用下,Jet-HR2 成功保持平衡且飞行状态稳定。
图|同时打开变桨控制器和偏航控制器后,Jet-HR2 起飞实验成功(来源:广东工业大学)
Jet-HR2(含电池)重 34 斤,额定总推力有 190 牛(N)。这款仿人机器人由无刷式直流电机和谐波传动减速器所驱动,整体包含 10 个关节处,腰部和脚掌分别安装了两组涵道风机作为推进器。
虽然 Jet-HR2 配备了两组,4 个涵道风机且每个风机可提供 10 斤推力,不过,由于 Jet-HR2 自身的推动力较小,难以进行稳定姿态的飞行及控制。为此,研究团队利用机器人足部涵道风机的推力矢量,可以有效地控制推力,并且还能抑制 Jet-HR2 升空时出现自转和俯冲的问题。此外,Jet-HR2 飞行高度可达 1000 毫米。
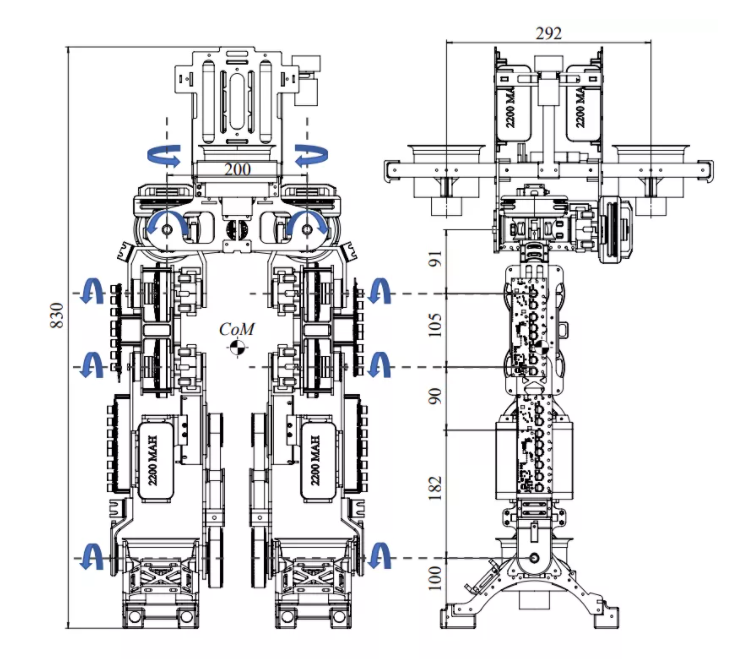 图|Jet-HR2 的配置(来源:广东工业大学)
图|Jet-HR2 的配置(来源:广东工业大学)
虽然在科幻世界中,Mark 帮助史塔克从一个花花公子、富豪变成了舍己为人的超级英雄钢铁侠。不过就算在现实里,仿人机器人同样可以替代人们在强辐射、有毒粉尘等高危环境中作业。
对于瘫痪病人而言,动力型义肢和机械外骨骼很有可能帮助他们实现重新站立。未来,仿人机器人或许能在海洋开发、医疗、太空探索、生物技术等众多领域代替人类,提供广泛的用途。
(来源:影视作品)
除了技术要求,由于人类对自身还未做到彻底了解,所以这也是限制仿人机器人发展的主要阻碍之一。不过,从人形外观的角度来看,仿生机器人具备得天独厚的优势。近年来,应用于各种灾害现场救援的机器人接连面世,无论是哪种救援机器人,最重要的是克服坎坷、崎岖、有障碍的地形。
对此,黄之峰告诉媒体:“我们的项目展示了一种全新的可能性,利用喷气推进的方式进行飞行或长距离跳跃,可以使机器人快速到达指定地点完成任务。”
虽然传统的仿人机器人还达不到人类的水平,但是在道路出现塌陷或者断层的灾害环境中,仿人机器人不仅可以通过攀爬克服某些障碍,并且当仿人机器人 “解锁” 例如跳高、跳远、短距离飞行等空中技能后。不难想象,这种可完成空中机能的仿人机器人将有更多的潜在应用方向。